
Sähköpostin muotovirhe
emailCannotEmpty
emailDoesExist
pwdLetterLimtTip
inconsistentPwd
resetAccountPassword
forTheAccount
pwdLetterLimtTip
inconsistentPwd
resetSuccess
resetSuccessTips
login


Servon erityinen strektuuri
2024-04-29 16:44:08
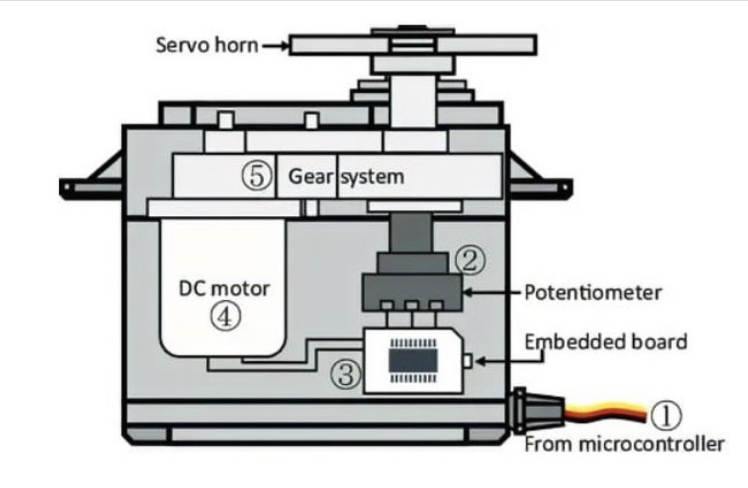
Servon erityinen rakenne on seuraava:
①: Signaalilinja: Vastaanota ohjaussignaali mikrokontrollerista;
②: potentiometri: Se voi mitata lähtöakselin sijainnin, joka kuuluu
koko servomekanismin palaute;
③: Sisäinen ohjain: signaalin käsittely ulkoisesta ohjauksesta, moottorin ajaminen ja
Palauteasennon signaalin käsittely on koko servomekanismin ydin;
④: Moottori: Toimilaitteena kuinka paljon nopeutta, vääntömomenttia, sijaintia on lähtö;
⑤: Lähetysmekanismi/servojärjestelmä: Tämä mekanismi skaalaa
Moottori lopulliseen lähtökulmaan tietyn voimansiirtosuhteen mukaisesti;
Servon lähtöä ohjataan lähettämällä PWM -signaali servon signaalilinjaan.
①: Signaalilinja: Vastaanota ohjaussignaali mikrokontrollerista;
②: potentiometri: Se voi mitata lähtöakselin sijainnin, joka kuuluu
koko servomekanismin palaute;
③: Sisäinen ohjain: signaalin käsittely ulkoisesta ohjauksesta, moottorin ajaminen ja
Palauteasennon signaalin käsittely on koko servomekanismin ydin;
④: Moottori: Toimilaitteena kuinka paljon nopeutta, vääntömomenttia, sijaintia on lähtö;
⑤: Lähetysmekanismi/servojärjestelmä: Tämä mekanismi skaalaa
Moottori lopulliseen lähtökulmaan tietyn voimansiirtosuhteen mukaisesti;
Servon lähtöä ohjataan lähettämällä PWM -signaali servon signaalilinjaan.
Ota meihin yhteyttä
TUOTTEEN TAGIT
Ota meihin yhteyttä
Lähetä kyselysi alla olevalla lomakkeella. Vastaamme sinulle 24 tunnin kuluessa.